Anticipating a Luddite Revival
Advances in information technology and robotics are already transforming the workplace, and even greater changes lie ahead. Here’s a look at what the next two decades might bring.
Even as computer-based consumer products have transformed our leisure and social lives over the past decade, information technology (IT) and robotics suggest a transformation of work that might be even more far-reaching. Some observers, including many workers, see this vision as inherently threatening.
Economists, however, have repeatedly argued that technological advance is central to economic growth and that workers displaced by technology in one sector will be absorbed in another. Of course, this process of adjustment takes time, and the economic arguments about long-term adjustment can seem particularly hollow during prolonged recessions. During these periods of lower economic activity, such as the slowdown the United States has recently been experiencing, displaced workers might find it difficult to move into new positions. Still, economics has provided a compelling model of the adjustments of the labor market to technological change, and the historical record has repeatedly demonstrated that the fears about substantial portions of the workforce being permanently displaced from work are unjustified.
But are economists and history right today? The nature of recent technological change suggests that the adjustments that were possible in the past might not continue to take place. Over the past few years, a new appreciation has emerged of the wide range of computer capabilities that are becoming available. In turn, these new capabilities suggest a broad range of occupations that could begin to see workforce displacement resulting from the applications of IT and robotics, including occupations in fields involving high levels of pay and expertise, such as medicine and law.
To help gain a better understanding of how such displacement might play out, I recently investigated the range of IT and robotics capabilities that could conceivably affect the workforce over the next few decades. The results to date are only suggestive, but they point the way toward more serious work that needs to be done in the coming years to understand the growing implications of IT and robotics for the workforce.
The exploratory study was motivated by two simple arguments about the possibility of understanding the implications of future technological change for the workplace.
The first argument is that the match between the new computer capabilities that are ready to be applied in the workplace and the capabilities currently being used by workers in different occupations is likely to be a useful guide to the occupations that will be most affected by new technology. So, for example, if computers have capabilities in speech recognition and simple reasoning, it is reasonable to expect that those capabilities can be combined to carry out some of the tasks of telephone operators and receptionists, as has been the case over the past few decades.
Of course, the technique of looking at the match between computer capabilities and occupational skill requirements is hardly foolproof. For one thing, we may overlook important skill requirements for some occupations, such as the substantial range of common-sense knowledge that enables a receptionist to reply sensibly when a customer makes an entirely unexpected request. For another, we may overlook the opportunities for reengineering a task to mechanize it in a way that uses different capabilities than those used by people, such as when the cotton gin replaced the detailed finger movements used by people to remove seeds from cotton fibers. Despite these challenges, however, the match between computer capabilities and occupational skill requirements provides a reasonable starting point for considering what jobs might be affected.
The second argument is that we can see new IT and robotics capabilities demonstrated in the research literature long before they are broadly applied in the workplace. Research has shown that such diffusion lags can often be several decades. Even in the fast-paced area of IT, where technology is being rapidly developed and applied, a straightforward application such as electronic invoicing can require decades to be fully adopted. The reason, of course, is that the adoption of new techniques usually requires substantial investment, as well as learning and adjustment by many people who are accustomed to using an existing system. In addition, many times the research techniques need to be refined before they can be applied commercially, or they might need to become cheaper or faster before their application is practical. Thus, although it is possible to use the research literature on computer capabilities to look several decades into the future of IT and robotics applications, it is not easy to predict when a new capability will be widely used.
Even with these caveats, it is worth considering how these emerging capabilities compare with work skills in different occupations and how they might affect work.
Assessing current skill sets
To gauge the current capabilities of research systems in IT and robotics, my investigatory study sampled articles from two journals, AI Magazine and IEEE Robotics & Automation Magazine, over a period of 10 years, from 2003 to 2012. Both journals publish articles that reflect a wide range of specialized research related to the capabilities of IT and robotics, and the articles are sufficiently technical to describe capabilities in some detail without being so technical as to be difficult for a nonspecialist to understand. Collectively, the articles presumably describe the IT and robotics capabilities that are currently seen as noteworthy; that is, they describe capabilities that are just now becoming feasible for IT and robotics systems to carry out with enough success that there are promising results to report, but sufficiently novel to be interesting to report. To guard against excessive techno-optimism, the study specifically looked for limits on the capabilities of the systems. Often these limits are described in terms of constraints on the range of topics covered or the complexity of the context in which the tasks are carried out.
In sum, the set of capabilities observed can be considered to define the rough limits of what has been demonstrated in the research literature, and that can form the basis for practical applications over the next few decades.
To bring some order to this mass of information, the study separated the capabilities into four general areas: language, reasoning, vision, and movement. Each of these areas can be compared to human capabilities, and each includes a collection of different but related capabilities that together provide the full range of competences that people typically have. Although the review focused separately on the four different areas, there was substantial overlap in the systems identified, because many of the systems integrate capabilities from several of the four general areas of capability.
Language capabilities. Fifteen articles described systems demonstrating language capabilities, which ranged across four specific aspects of language: understanding speech, speaking, reading, and writing. The systems involved a diverse range of tasks.
In the articles from the first five years (2003 to 2007), the tasks included detecting problematic text in an insurance application, providing customer service for sales and repairs, explaining the answers to chemistry questions in an advanced high-school test, describing the movement of cars in a video of a traffic intersection, translating car assembly instructions, asking for help in finding the registration booth at a conference, giving a conference talk that included questions from the audience, and role-playing with students in a training simulation about how a military officer should handle a car accident with a civilian.
In the articles from the later five years (2008 to 2012), the tasks included screening medical articles for inclusion in a systematic research review, solving crossword puzzles with Web searches, answering Jeopardy questions with trick language cues across a large range of topics, answering questions from museum visitors, talking with people about directions and the weather, answering written questions with Web searches, following speech commands to locate and retrieve drinks and laundry in a room, and using Web site searches to find information to carry out a novel task.
The length and complexity of the language that these systems could handle often corresponded roughly to a few pages of written material. Of course, text length is only a crude way of gauging language complexity—a short poem or technical argument can be quite difficult to understand—but it does provide some sense of the language capabilities of the systems. They have advanced beyond the challenges of typical language use at the word or sentence level, but they fall far short of typical extended language use at the lecture or book level.
One important aspect of language involves adjusting to the needs of the person who is being communicated with and the requirements of the situation. Several of the example systems exhibited this kind of sensitivity, including the ability of the conference-talk system to monitor its points and not repeat them, and the ability of the training-simulation system to reason about emotion in order to choose appropriate language and understand imprecise language.
Considered over time, the articles showed some progression in the range of topics addressed by the different systems. In the first half of the period, all of the systems focused on language use within a single topic area. In contrast, a number of systems described in the later articles attempted to deal with an unlimited range of topics by tapping into a range of source material available on the Web.
Reasoning capabilities. Twenty-one articles described systems demonstrating reasoning capabilities. The systems showed a number of different aspects of reasoning, including recognizing that a problem exists, applying general rules to solve a problem, and developing new rules or conclusions.
In the articles from the first five years, the tasks addressed included making underwriting decisions about long-term care insurance, providing customer service for sales and repairs, developing new hypotheses about good conditions for growing crystals and for recovering from medical disability, helping diagnose appliance problems, providing useful analogies for solving problems in physics and in military tactical games, providing answers and explanations to chemistry questions in an advanced high-school test, developing novel atomic models for electron-density maps of proteins, identifying patterns of potentially suspicious facts that could indicate a terrorist plan, resolving problems related to scheduling and project coordination, role-playing with students in a training simulation about how a military officer should handle a car accident with a civilian, and driving a vehicle on different types of road.
In the later articles, the tasks included screening medical articles for inclusion in a systematic research review, processing government forms related to immigration and marriage, solving crossword puzzles, playing Jeopardy, answering questions from museum visitors, analyzing geological landform data to determine age, talking with people about directions and the weather, answering questions with Web searches, driving a vehicle in traffic and on roads with unexpected obstacles, solving problems with directions that contain missing or erroneous information, and using Web sites to find information for carrying out novel tasks.
One of the striking aspects of the reasoning systems was their ability to produce high levels of performance. For example, the systems were able to make insurance underwriting decisions about easy cases and provide guidance to underwriters about more difficult ones, produce novel hypotheses about growing crystals that were sufficiently promising to merit further investigation, substantially improved the ability of call center representatives to diagnose appliance problems, achieved scores on a chemistry exam comparable to the mean score of advanced high-school students, produced initial atomic models for proteins that substantially reduced the time needed for experts to develop refined models, substituted for medical researchers in screening articles for inclusion in a systematic research review, solved crossword puzzles at an expert level, played Jeopardy at an expert level, and analyzed geological landform data at an expert level.
However, common-sense reasoning has historically been more difficult for IT systems to demonstrate. The articles from the first five years were consistent with the historical contrast, showing high levels of reasoning within narrow areas of specialized expertise but no evidence of the broad and more flexible reasoning that is typical of human common sense. But during the later period, there were examples of systems that used information from the Web to reason across a broad range of areas.
TABLE 1
Vision capabilities. Twenty-two articles described systems demonstrating vision capabilities. These include systems that recognized objects and different features of those objects, including their position in space.
In the articles from the early years, the tasks of the systems included locating a soccer ball and other soccer players, identifying cars and their movements in a video of a traffic intersection, finding the registration booth and several rooms at a conference, identifying drivable surfaces and obstacles for an autonomous car, determining the location of a ping-pong ball, guiding autonomous vehicles to move shipping containers, identifying people and obstacles in a crowded museum, locating pallets in a factory, recognizing objects in cluttered environments, guiding a robot to grasp irregularly shaped objects such as lettuce, and identifying vehicles on a road to provide driver assistance.
In the later articles, the tasks included recognizing chess pieces by location, rapidly identifying types of fish, recognizing the presence of nearby people, identifying the movements of other vehicles for an autonomous car, locating and grasping objects in a cluttered environment, moving around a cluttered environment without collisions, learning to play ball-and-cup, playing a game that involved building towers of blocks, navigating public streets and avoiding obstacles to collect trash, identifying people and locating drinks and laundry in an apartment, and using Web sites to find visual information for carrying out novel tasks such as making pancakes from a package mix.
All of the systems involved identifying various—and diverse—objects, and they all also involved recognizing features of the identified objects, particularly their location and movement.
Movement capabilities. Seventeen articles described systems demonstrating movement capabilities. These included systems that involved spatial orientation, coordination, movement control, and body equilibrium. Many of the systems integrated movement capabilities with capabilities in one or more of the other three general areas of capability.
In the early articles, the tasks of the systems included walking, kicking a ball, passing a ball between two robots, moving down a hallway, following a map to locate a meeting room in a hotel, using an elevator, driving a car in the desert, playing ping-pong, autonomously moving shipping containers, navigating around people and pursuing objects in a crowded museum, moving pallets autonomously in a factory, and grasping irregularly shaped objects such as lettuce.
In the later articles, the tasks included moving chess pieces, driving a car in traffic, grasping objects in a cluttered environment, moving around a cluttered environment without collisions, learning to play ball-and-cup, playing a game that involved building towers of blocks, navigating public streets and avoiding obstacles to collect trash, retrieving and delivering drinks and laundry in an apartment, and using the Web to figure out how to make pancakes from a package mix.
Comparing capabilities and work skills
With these examples of IT and robotics capabilities, we can then look at the skills required in different occupations to see how they compare. To make this comparison, the study used the U.S. Department of Labor’s O*NET system, which provides ratings for hundreds of occupations on many different features. The feature set includes ratings for a number of ability scales that are related to the four general areas of capability discussed above.
O*NET uses a seven-point scale to rate the level of requirement for each ability for each occupation, with anchoring tasks for the ratings provided for levels 2, 4, and 6. The study used these anchoring tasks to provide concrete descriptions of the different levels of capability required for different jobs throughout the economy.
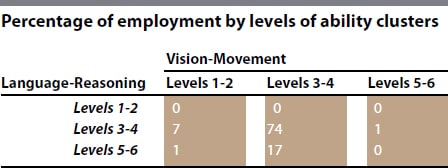
To focus on the big picture, the study grouped together all of the different abilities into two cluster ratings: one focused on language and reasoning, and the other focused on vision and movement. For each occupation, the highest rating across the different abilities was used as the rating for each of the two clusters.
TABLE 2
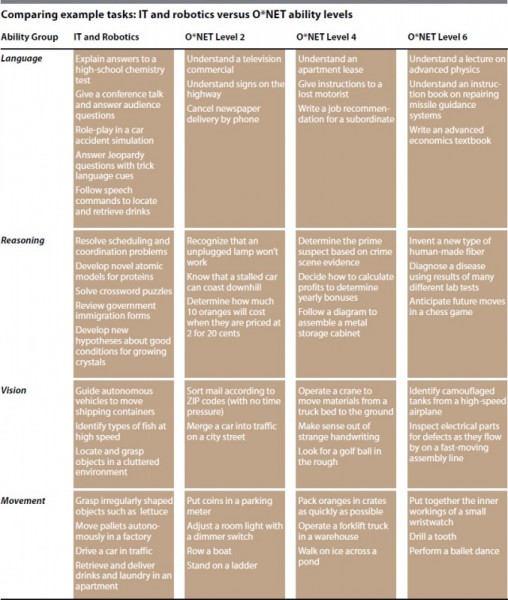
TABLE 3
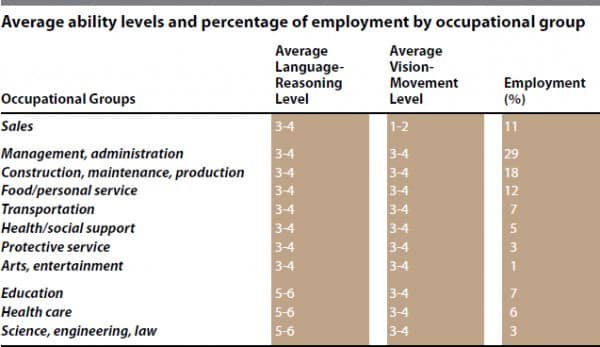
Table 1 shows the distribution of employment in the economy for the different capability combinations, using the O*NET rating scales. (The table omits level 7 on the rating scale because there are so few jobs that require that level of skill.) The table makes clear that the vast majority of current jobs—roughly 81%—can be carried out with a combination of abilities at the O*NET level of 4.
So a crucial question for assessing the likely impact of IT and robotics capabilities on work over the next few decades is how those capabilities compare with this middle level of ability on the rating scale for workers. Table 2 contrasts some sample IT and robotics tasks drawn from the study with some anchoring tasks from the O*NET rating scales across the four general areas of ability.
Comparing the sample tasks for the IT and robotics research systems with the anchoring tasks for the different O*NET levels shows that the IT and robotics systems are solidly in the middle range of ability levels across all four general areas of ability. In each case, there are clear ways that the IT and robotics capabilities fall short of the higher levels of human performance, but the capabilities that are typical of level 4 on the O*NET scales appear to be roughly comparable to the types of tasks now being described in the research literature.
To help think about the relation between the various research tasks and the actual workplace, Table 3 shows the average O*NET levels for broad occupational groups, along with their portion of total employment. At the top of Table 3, sales occupations represent 11% of employment and involve a medium level of language and reasoning skills, but generally low levels of vision and movement. The nation has already seen some replacement of sales jobs with technology in the extensive use of the Web for retail, along with the use of self checkout in stores.
Currently, the level of interaction provided by such sales-related technology is low, but the research systems show capabilities that would allow more helpful interactions. Some of the research systems specifically provided interactions related to customer service, as well as related tasks such as answering questions from museum visitors or giving people directions. Some of the reasoning systems provided underlying analytic capabilities that could extend the kinds of transactions that can be carried out without a person, including processing government forms, using Web sites to find information, making insurance underwriting decisions, or diagnosing appliance problems.
It is possible to imagine how the ease and range of interaction and the depth of analysis of sales-related computer systems can be steadily extended over time to add many functions of current sales occupations. Future systems will be able to use regular language with customers to understand what they are looking for and to suggest possible solutions.
The middle section of Table 3 includes the large number of occupational groups involving both a medium level of language and reasoning skills and a medium level of vision and movement. The language and reasoning skills for many of these jobs are similar to those for the sales occupations just discussed. It is easy to imagine, for example, that the interaction and analysis that will make it possible to extend the capabilities of sales-related computer systems will also be applicable to the capabilities of administrative systems, where there is often an interaction with an internal customer.
As a contrast, it is useful to consider one of the occupational groups in the middle section that involves an extensive role for vision and movement. Physical movement is important for jobs in construction, maintenance, and production, as well as for jobs in food and personal service. These two large occupational groups represent 30% of current employment.
The use of automatic machines for performing physical movements has been key to the substantial improvements in manufacturing productivity over the past century. The research systems in vision and movement suggest how the high levels of performance that have been demonstrated in factories will begin to be extended into the more complicated settings where construction, maintenance, and food and personal service tasks are carried out. Some of the example systems directly involve maintenance or food service tasks, such as the system that moves around public streets to collect trash, the system that delivers drinks to people in an apartment, the system that can grasp irregular objects such as lettuce, and the system that can identify different types of fish.
One can imagine how the automatic capabilities that have been applied in factories can be extended into less controlled work settings over time. The Roomba (a robotic vacuum cleaner) could evolve into more extensive cleaning capabilities, and robots could be deployed for food preparation outside of factories. This will be a continuation of the automation that has taken place in factories, but it will be taking place in increasingly less controlled workplaces as robots become more flexible.
At the bottom of Table 3, there are three occupational groups involving a high level of language and reasoning skills and a medium level of vision movement. The jobs in these groups are ones that often involve higher levels of language and reasoning skills that are likely to be beyond the capabilities of the research systems.
Implications for work and the economy
This exploratory study suggests that there is the technological potential for a massive transformation in the labor market over the next few decades. It will clearly take time for the capabilities that have been roughly demonstrated in the research literature to be refined and broadly applied to the many different types of work. However, even a diffusion period of several decades is relatively short for adapting to a change of such magnitude.
In principle, there is no problem with imagining a transformation in the labor market that substitutes technology for workers for 80% of current jobs and then expands employment in the remaining 20% to absorb the entire labor force. Considering the contrasts across the occupational groups in Table 3, such a change might involve a drastic reduction in sales, management, administration, construction, maintenance, and food service work accompanied by a massive expansion in health care, education, science, engineering, and law.
The United States experienced a labor market transformation of this scale between the early 19th and the late 20th century, when the portion of the workforce employed in agriculture shifted from roughly 80% to just a few percent. However, in the shift out of agriculture, the transformation took place over a century and a half, not several decades.
In addition to the speed of the change, there are two other challenges.
The first challenge relates to the feasibility of preparing the entire labor force to move into jobs that require capabilities at the higher O*NET levels. The level 6 anchoring tasks in Table 2 are not only difficult for IT and robotics systems to carry out, but they are also difficult for many people to carry out. We do not know how successful the nation can be in trying to prepare everyone in the labor force for jobs that require these higher skill levels. It is hard to imagine, for example, that most of the labor force will move into jobs in health care, education, science, engineering, and law.
The second challenge relates to the further improvement of the capabilities of IT and robotics. Even during the limited period covered by the exploratory study, there was some indication of the advancement of capabilities. And over an additional period of several decades of R&D, the capabilities required for the level 6 anchoring tasks might well be within reach.
These challenges—the speed of the transformation, the difficulty of level 6 tasks for many people, and the continued development of IT and robotics capabilities—suggest that the economic adjustment to the application of IT and robotics capabilities over the next several decades is likely to be quite difficult. Although economists are right in principle that displaced workers should be able to move into new positions—as long as there is substantial labor demand for tasks that only people can perform—it seems unlikely that the structure of the labor market can change as quickly as the technology is advancing.
Even if alternative jobs are available, how will the displaced workers acquire the necessary skills for the new tasks? At some point it will be too difficult for large numbers of displaced workers to move into jobs requiring capabilities that are difficult for most of them to carry out even if they have the time and resources for retraining. When that time comes, the nation will be forced to reconsider the role that paid employment plays in distributing economic goods and services and in providing a meaningful focus for many people’s daily lives.
The preliminary review presented here suggests that society must begin to be much more serious about understanding the potential for IT and robotics to cause disruptive changes to the labor market over the next few decades. The scale and speed of this potential change are too great to be able to depend on ordinary economic adjustment to smooth out disruptions in the labor market.
Over the next decade or two, it is essential for researchers and national policymakers to understand the growing capabilities of IT and robotics and their implications for the workforce and the economy. The anecdotal articles that regularly appear about new technologies are not sufficient to provide the basis for understanding the full range of capabilities being developed and how they will affect employment.
To advance this understanding, the basic approach discussed here—comparing the full range of IT and robotics capabilities with the full range of capabilities used in different occupations—should be carried out more systematically and in more detail. Such systematic reviews need to be carried out once or twice each decade to make it possible to track the development of the capabilities and anticipate the full range of their consequences.
Society has the tools to think systematically about the capabilities that are now being demonstrated by IT and robotics systems and how those compare to the capabilities that are used in the workforce. The nation needs to begin to carry out the analyses that these tools allow to better understand the potential for IT and robotics to transform jobs in the years ahead.